SIPHONOBOT
ABOUT THE PROJECT
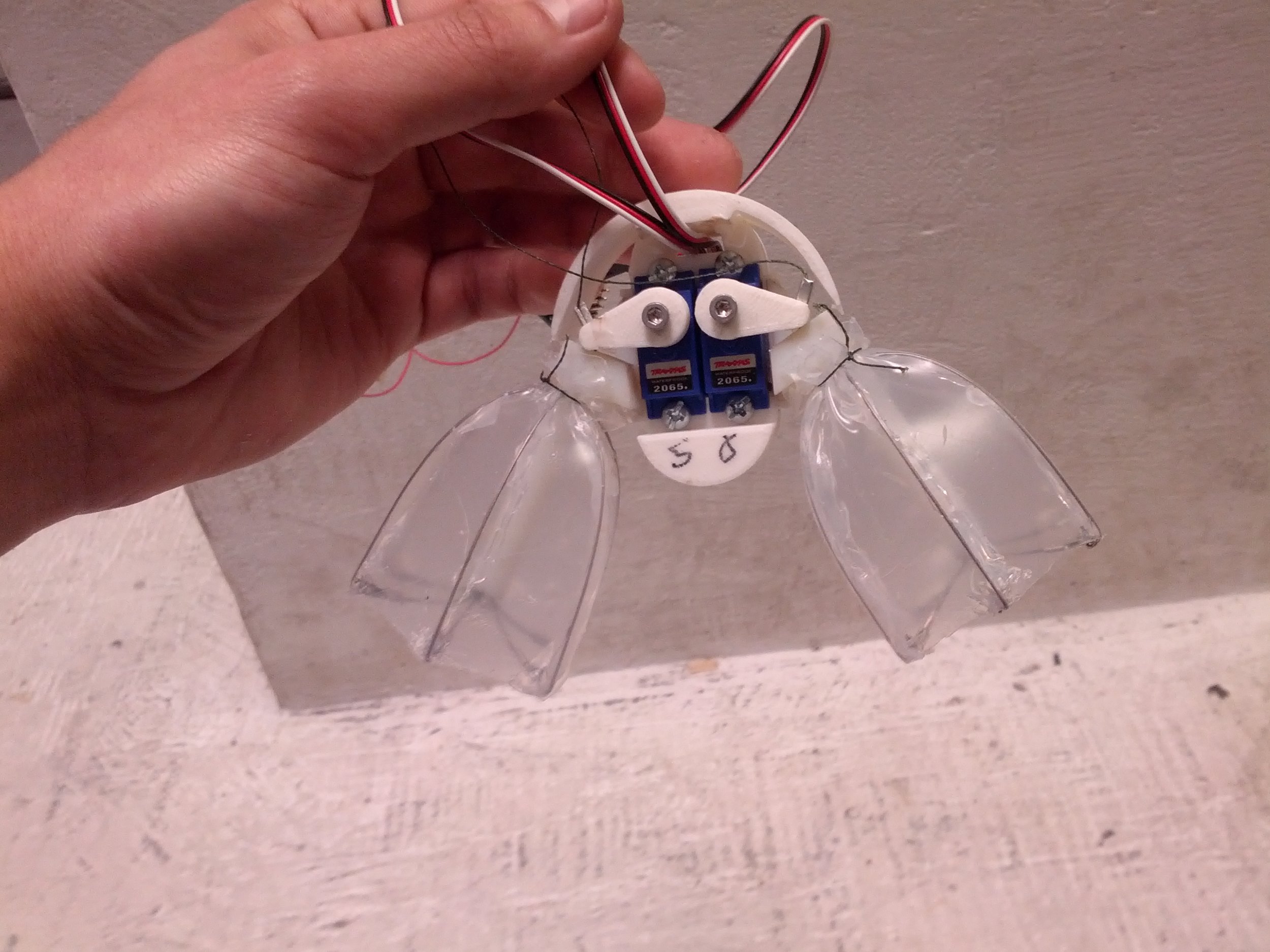
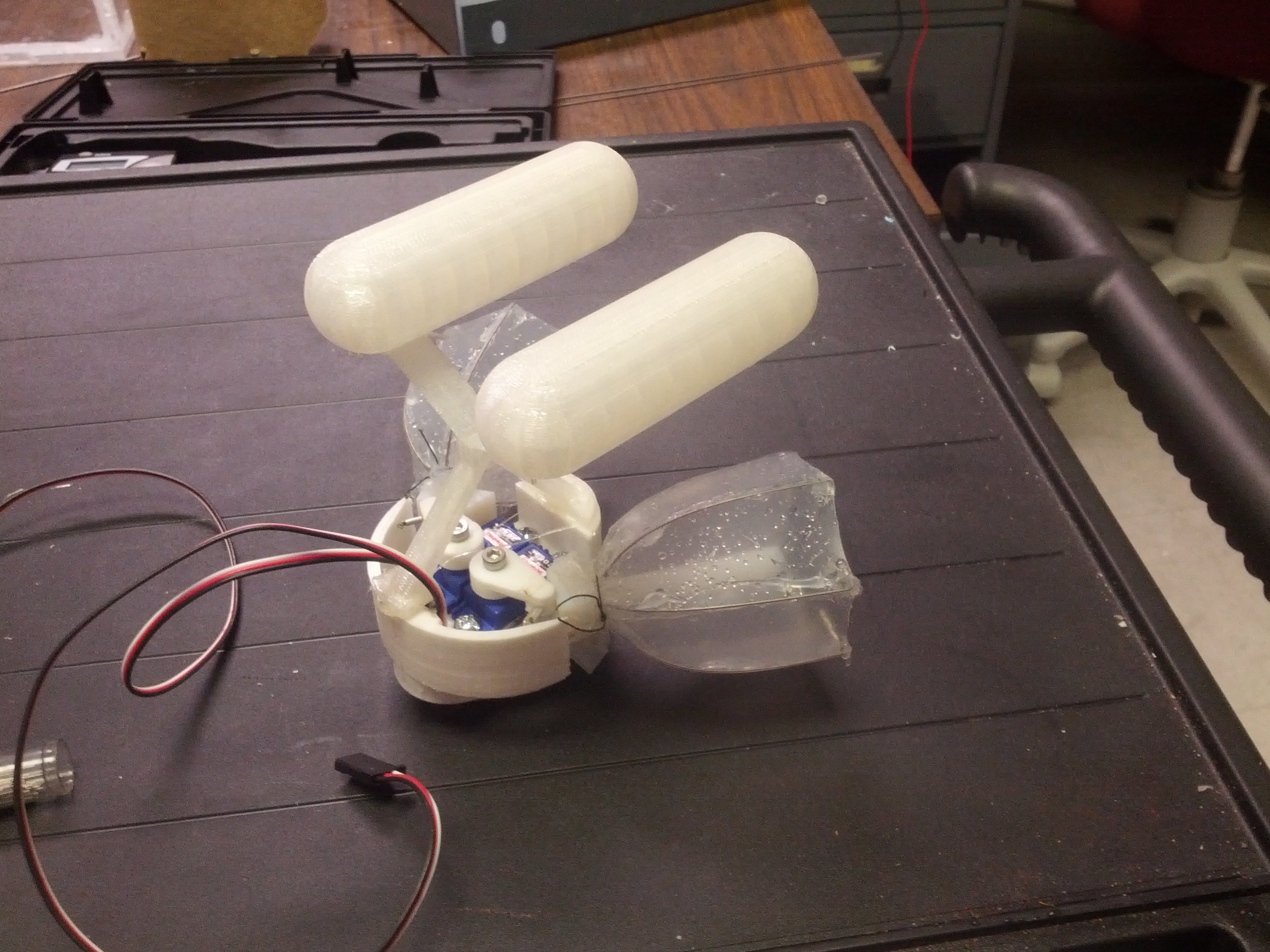
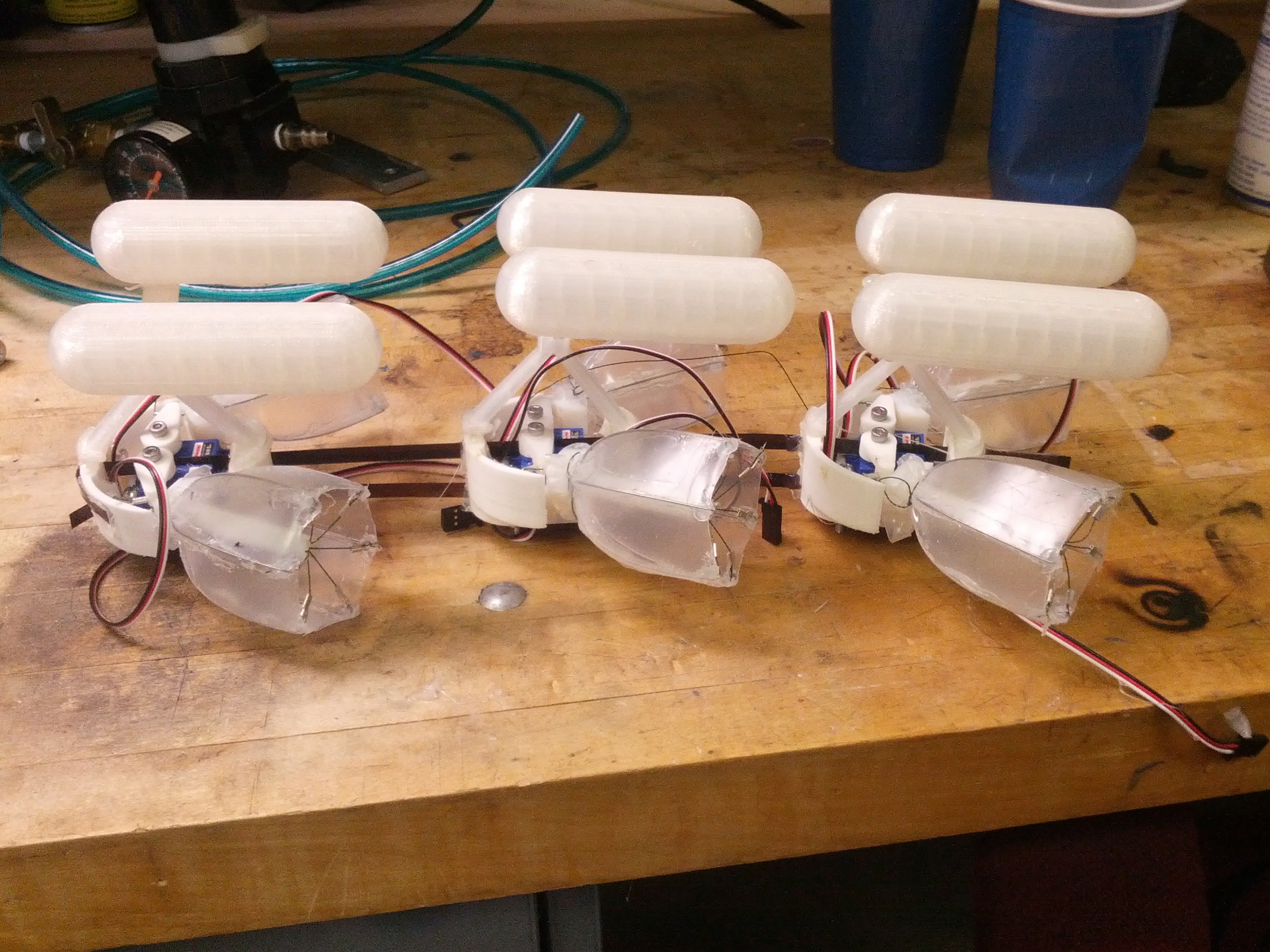
The Siphonobot is a underwater robot based on the Siphonophore, a multi-organism sea creature that uses multi-jet propulsion to achieve locomotion. The robot consists of silicone jetting propulsors actuated by servo motors. Each propulsor can be triggered individually to achieve various jetting gaits.
MY ROLE
- R&D for bio-inspired design
- Conceptualization and design of robot
- Fabrication and testing of robot and actuation mechanism